
赤外線障害物回避センサモジュールの使い方
パーツについて
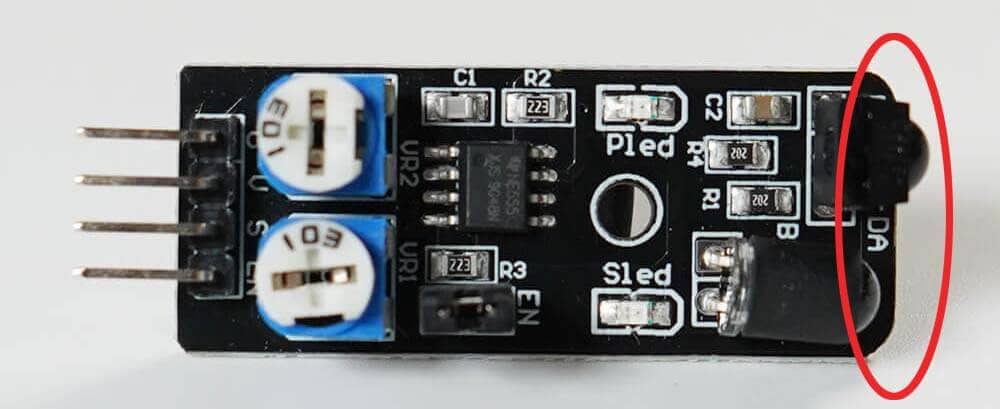
写真の赤丸部分にある赤外線を送受信できるセンサによって、センサの前に障害物があるかどうかをデジタル信号 High(true) / Low(false)で出力します。
センサ側で変更・確認できる事
センサに電気が通っている場合、Pled(センサに組み込まれたLED)が点灯し、障害物を検知した場合、Sled(センサに組み込まれたLED)が点灯します。
また、パーツの下部のポテンショメータを回すことで検知する距離を変更することができます。
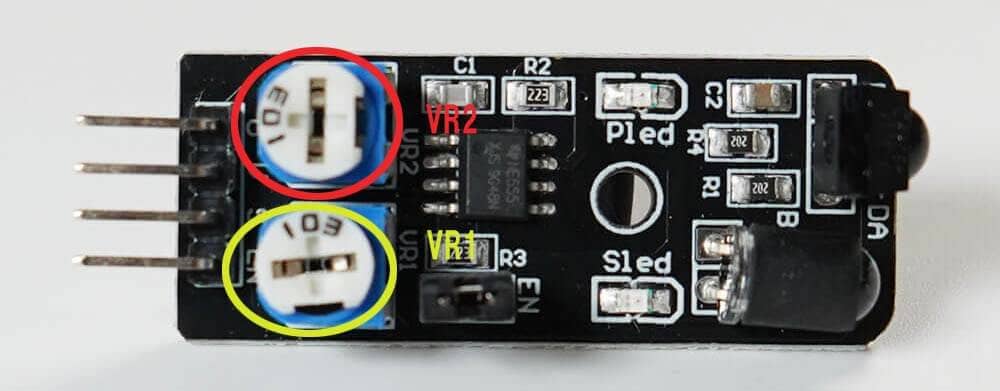
VR1(黄色丸部分)のポテンショメータは赤外線送信の調整です。
右回りに回すことで検出距離を長く、左回りに回すことで検出距離を短く調整できます。
VR2(赤丸部分)のポテンショメータは赤外線受信の調整です。
右回りに回すことで検出距離を長く、左回りに回すことで検出距離を短く調整できます。細かい調整が必要な場合だけ調整してください。
※ドライバーなどでゆっくり回して調整してください。回せる範囲が決まってますので、無理に回したり強い力で回すと故障の原因になりますのでご注意ください。
※調整範囲を超えると、センサが常に検出または検出しなくなる場合があります。その場合は逆方向に回し直して調整してください。
【動画: 赤外線障害物回避センサモジュールの調整方法】
赤外線障害回避センサーの検出距離の調整方法
赤外線障害回避センサーの検出距離の調整方法について
検出距離調整のための準備
現在の検知距離を確認
検知距離の変更
要調整のセンサーの状態
ENピンについて
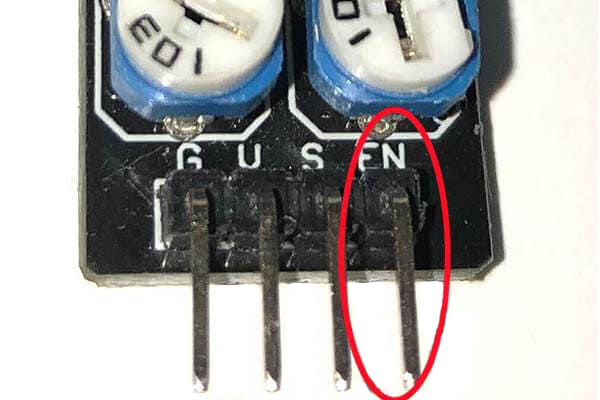
ENピンは通常ではつなぐ必要がありませんが、センサが有効(Enable)かどうかを決めることができます。
ENピンのデジタル信号が、High(true)の場合はセンサが有効になり、Low(false)にするとセンサは強制的に無効になります。
最初の状態(ジャンパーワイヤを繋げていない状態)ではセンサは有効のHigh(true)です。
変更する場合は、ENピンをスペースブロックのデジタル対応ピンとつないでから、「デジタル出力」ブロックでHigh/Lowを送ることで変更ができます。
仕様
| 電圧 | 5V |
|---|---|
| 出力信号 | デジタル |
| 検出距離 | 2〜40cm |
| 検出角度 | 35° |
| 温度範囲 | -10~50℃ |
| サイズ | 45 x 16 (mm) |
つなぎ方
赤外線障害物回避センサモジュールとスペースブロック専用マイコンボードを以下のようにジャンパーワイヤ(オス-メス)を使ってつなぎます。
- 赤外線障害物回避センサのSピンと、スペースブロックのデジタル対応ピン
- 赤外線障害物回避センサのGピンと、スペースブロックのGND
- 赤外線障害物回避センサのVピンと、スペースブロックの5Vまたは3.3V
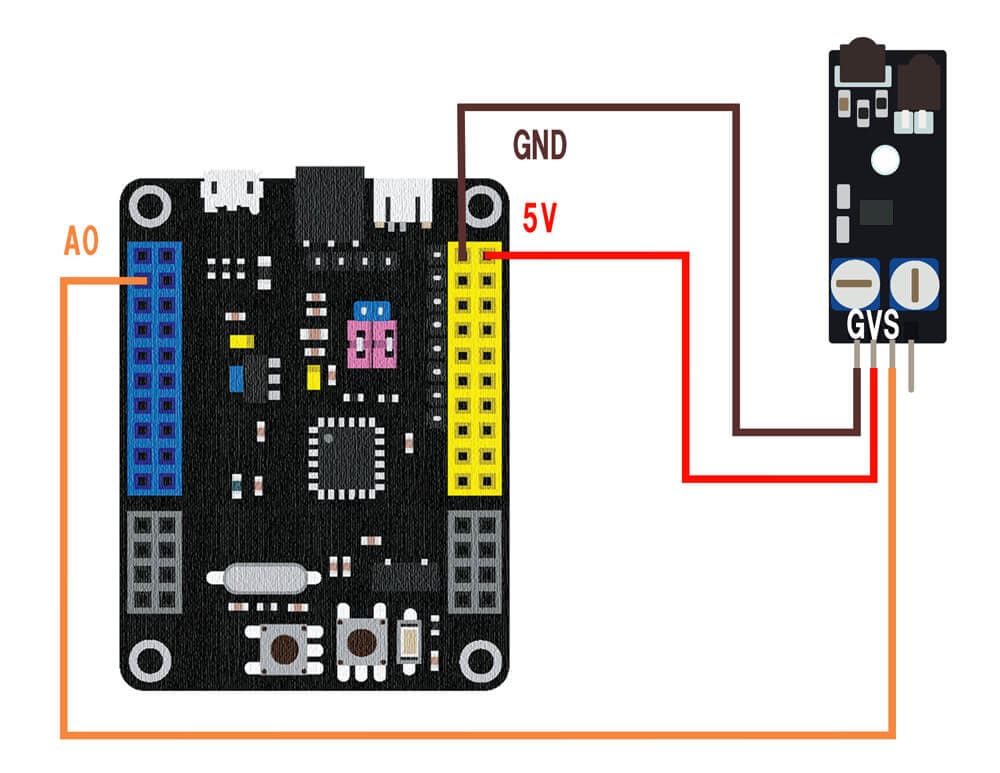
※画像は信号線をA0のピンに接続した図です。デジタル対応ピンはA0~A10、A13、A15、B0~B15、C14~C15です。
※5V、3.3VやGNDはスペースブロック専用マイコンボード上の同じ表記のピンに挿すこともできます。
使い方
センサの前に何もなければHigh(true)、障害物があるとLow(false)を返します。
プロジェクトのカテゴリ「入力」にあるブロックで赤外線障害物回避センサモジュールから値を取得できます。
ブロックの詳しい使い方はこちら
デジタル読み取り