
ライントラッキングセンサモジュールの使い方
パーツについて
通常、未検出状態はHigh、白を検出するとLowになります。センサから約2cmまでの距離の物体が白色か黒色かを判別することができるセンサです。
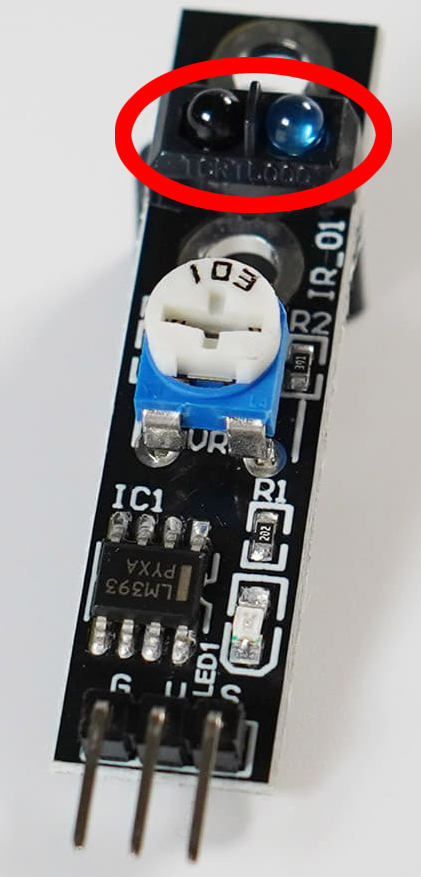
赤外線の反射された信号の強さによってセンサーが動作します。白色は赤外線を強く反射するため信号が強くなり、黒色は赤外線を吸収するため、反射されないか信号が弱くなります。センサはその信号の強さを判別します。 また物体が無い場合も赤外線が反射されないので黒色と同じ扱いです。
この仕組みによって、例えば白い紙にかいた黒い線の上を走るロボットカーなどを作ることもできます。
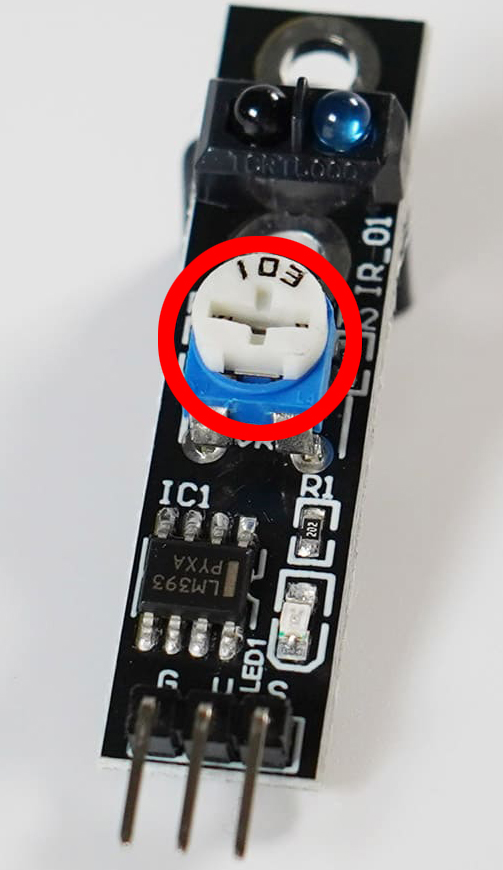
センサ側で変更・確認できる事
ポテンショメータを左回り(反時計回り)に回すと感度が低く(黒を検知しやすく)なり、右回り(時計回り)に回すと感度が強く(白を検出しやすく)なります。
仕様
| 電圧 | 5V |
|---|---|
| 出力信号 | デジタル |
| 温度範囲 | 0~50℃ |
| サイズ | 47 x 11 (mm) |
つなぎ方
ライントラッキングセンサモジュールとスペースブロック専用マイコンボードを以下のようにジャンパーワイヤ(オス-メス)を使ってつなぎます。
- ライントラッキングセンサのSピンと、スペースブロックのデジタル対応ピン
- ライントラッキングセンサのGピンと、スペースブロックのGND
- ライントラッキングセンサのVピンと、スペースブロックの5V
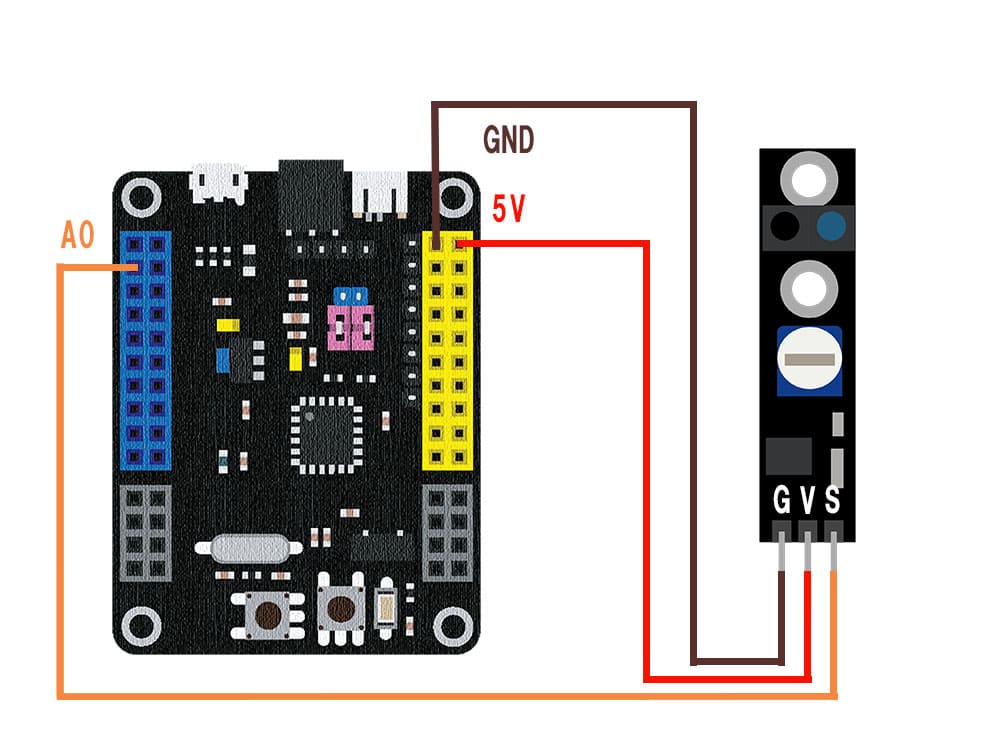
※画像は信号線をA0のピンに接続した図です。デジタル対応ピンはA0~A10、A13、A15、B0~B15、C14~C15です。
※5VやGNDはスペースブロック専用マイコンボード上の同じ表記のピンに挿すこともできます。
使い方
白色(赤外線を強く反射するもの)を検出していない時はHigh(true)を返します。
白色(赤外線を強く反射するもの)を検出した時はLow(false)を返します。
プロジェクトのカテゴリ「入力」にあるブロックでライントラッキングセンサモジュールから値を取得できます。
ブロックの詳しい使い方はこちら
デジタル読み取り