
360°連続回転サーボモーターの使い方

指定した速度と方向(時計回り、反時計回り)にモーターを連続回転することができます。前後に動かせるロボットカーなどにも使えます。
茶色の線がGND、赤色の線が電源の+、オレンジ色の線が信号線になります。
パーツについて
写真の赤丸部分を回転させることができます。信号に応じて回転方向と速度を調整して動かすことができます。

付属マウントについて
360°連続回転サーボモーターの回転軸に付属のサーボホーン(白いマウントパーツ)を取り付けることができます。

仕様
| 電圧 | 5V |
|---|---|
| 制御パルス | 500~2500μsec |
| トルク | 1.5kgf・cm |
| 動作速度 | 0.09秒 / 60° |
| 温度範囲 | -17~55℃ |
| サイズ | 23 x 13 x 30 (mm) |
| 重量 | 9g |
つなぎ方
360°連続回転サーボモーターとスペースブロック専用マイコンボードを以下のようにジャンパーワイヤ(オス-オス)を使ってつなぎます。
- サーボモーターのオレンジ色の線とスペースブロックのPWM対応ピン
- サーボモーターの茶色の線とスペースブロックのGND
- サーボモーターの赤色の線とスペースブロックの5V
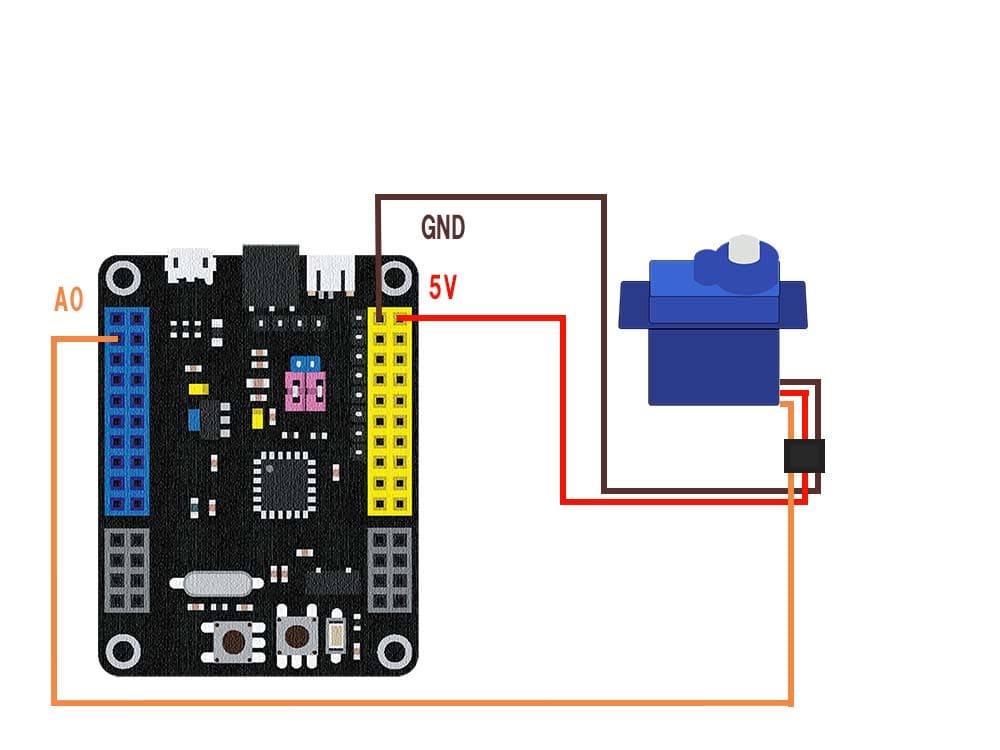
※画像は信号線をA0のピンに接続した図です。PWM対応ピンはA0、B0、A10、B8です。
※5VやGNDはスペースブロック専用マイコンボード上の同じ表記のピンに挿すこともできます。
使い方
ブロックで360°連続回転サーボモーターの回転方向と速度を命令できます。
プロジェクトのカテゴリ「出力」の「サーボモーター」にある専用ブロックでサーボモーターを使用できます。
ブロックの詳しい使い方はこちら
回転サーボを~%の速さで回転