
[No.10]自動で開くゴミ箱を発明!

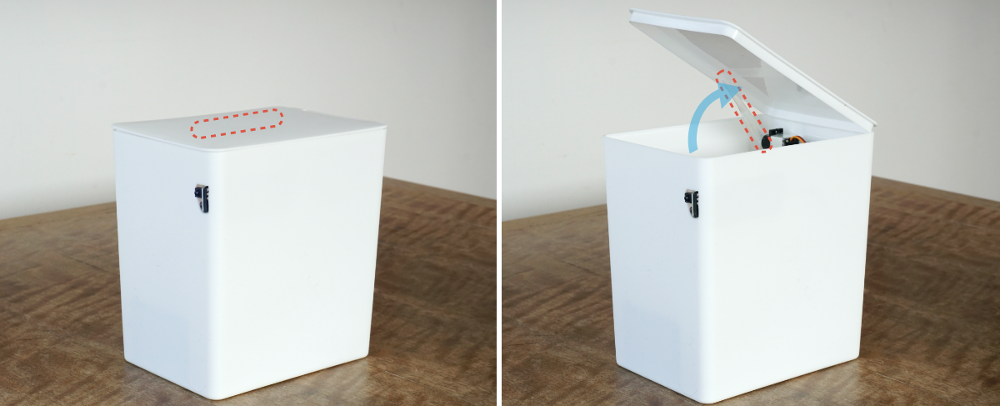
ゴミ箱のフタを開けるのって意外と面倒なんだよなぁ……手がゴミでふさがっているし……そんな「ちょっと困った!」を解決したいときは、小さなものづくりコンピューター「SPACEBLOCK(スペースブロック)」におまかせ!! 今回はゴミ箱を改造して、ゴミを捨てようとするとフタが自動的にぴょんっと開く自動ゴミ箱にしちゃいましょう。 今回改造したいゴミ箱は……こちら!卓上に置いて勉強中にちょっと食べたお菓子の袋をぽいっと捨てるのに便利です。花粉症の季節にも活躍しそうですね!
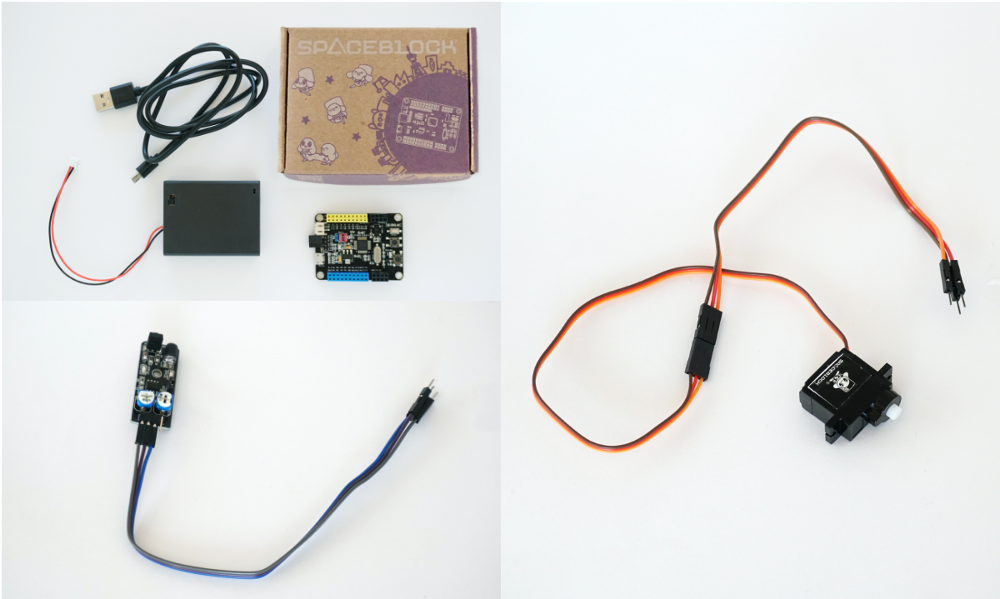
今回の改造には「180°マイクロサーボモーター」と「赤外線障害物回避センサモジュール」を使いますよ。
必要なもの&準備
- SPACEBLOCK通常パッケージ[SPACEBLOCK本体、USBケーブル、電池ボックス]
- 赤外線障害物回避センサモジュール(障害物回避センサ)
- 180°マイクロサーボモーター(サーボモーター)
- プログラミングをするパソコン
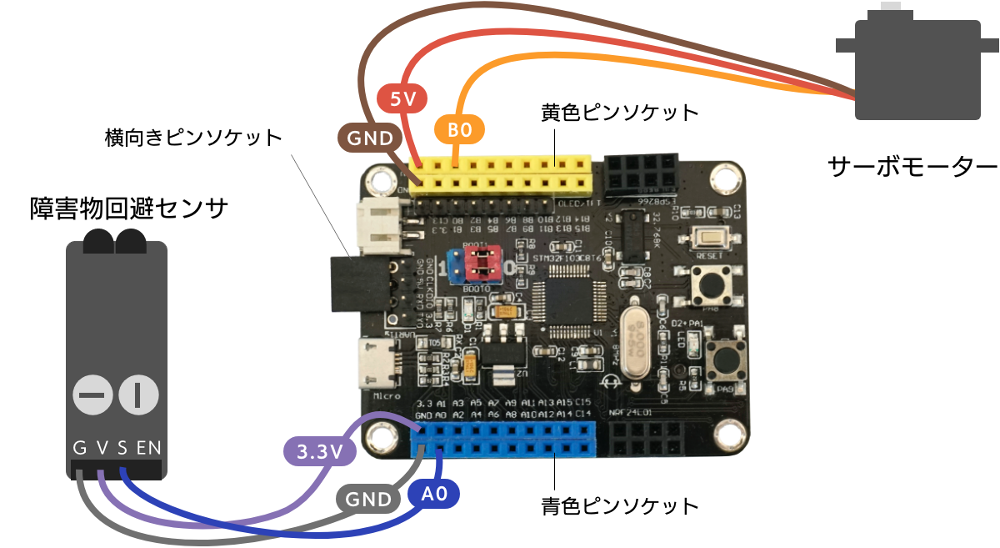
SPACEBLOCKに拡張パーツを接続する
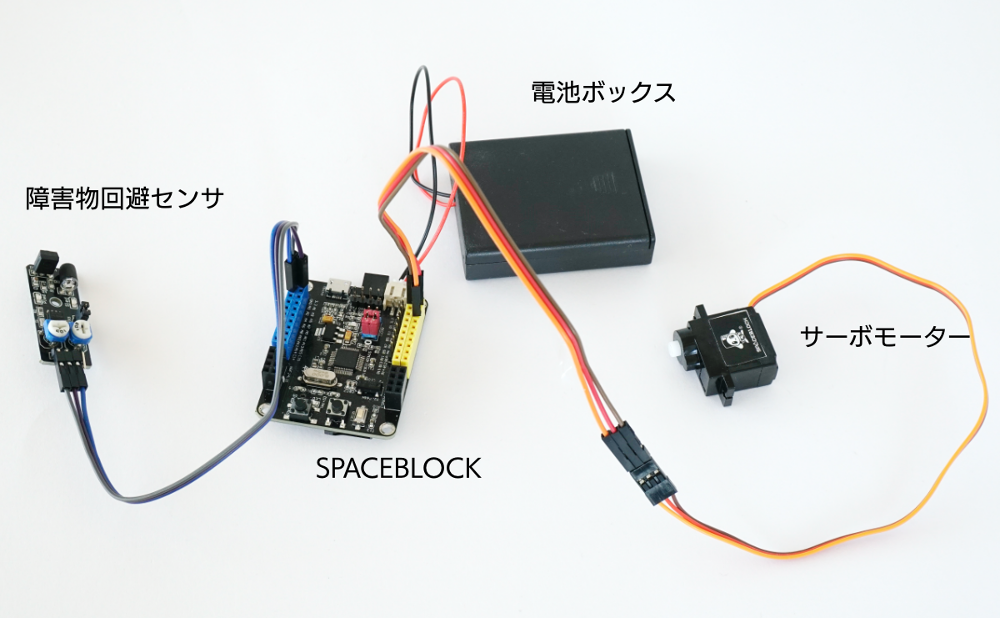
細かい部分は次の図を参考にしてください。障害物回避センサには4本のピンヘッダがありますが、このうち「G」「V」「S」と書かれた3本だけを使います。
サーボモーターって何ができるの?
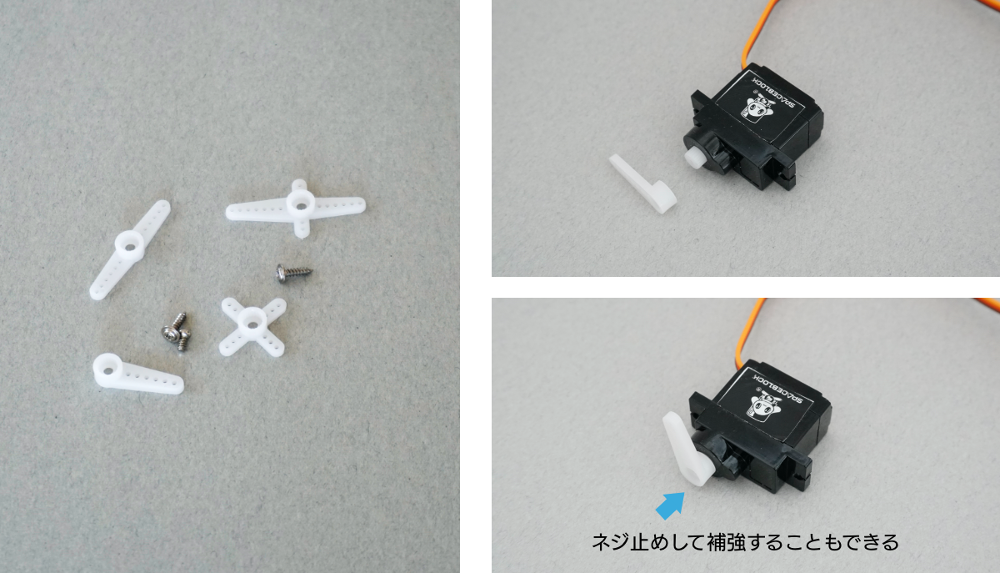
プログラムするときは「出力」カテゴリーの[サーボ《A0(T2)》を《90》°に動かす]ブロックを使います。

障害物回避センサって何ができるの?
障害物回避センサは、赤外線によって一定の距離内に障害物があるかどうかを検知することができます。今回はゴミ箱の近くに手が来たことを検知するために使います。
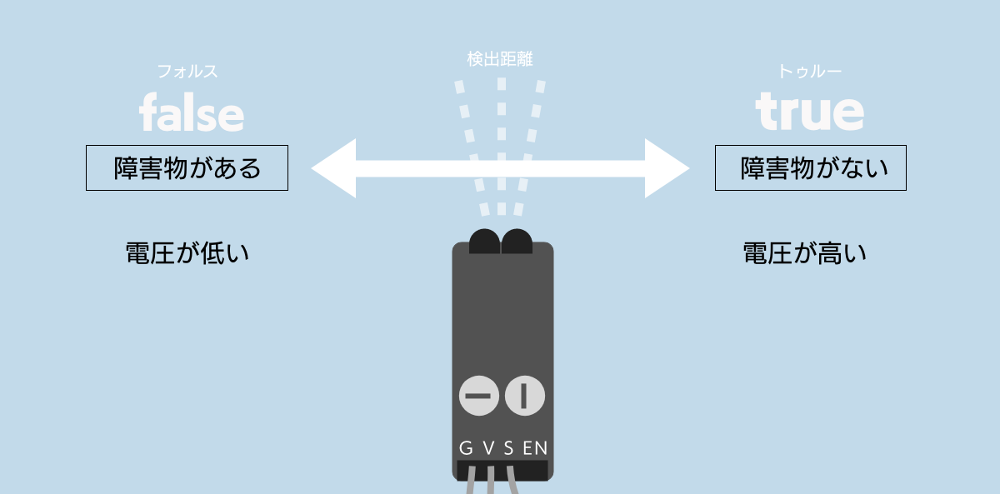
障害物となるものがあるか、何もないのかを判定してコンピューターに情報を渡すことができますが、障害物までの距離や障害物の大きさなどの情報を渡すことはできません。このように「ある」「ない」など2つの情報だけを渡すことをデジタル入力と呼びます。
障害物回避センサは、何も障害物がない状態ならば挿したピンヘッダの電圧を高くして、何か障害物があると電圧を下げます。なお、今回は使いませんがプログラミングではtrue(トゥルー)とfalse(フォルス)という値を使うことがあり、デジタル入力の場合、電圧が高いときはtrue、電圧が低いときはfalseという値がプログラムに渡されます。
プログラミングには、[入力]カテゴリーの[《A0》の電圧が《上がった》]というブロックを使います。障害物を検出すると電圧は低くなりますから、障害物があるときの動きをプログラムしたいときは、[《A0》の電圧が《下がった》]とします。

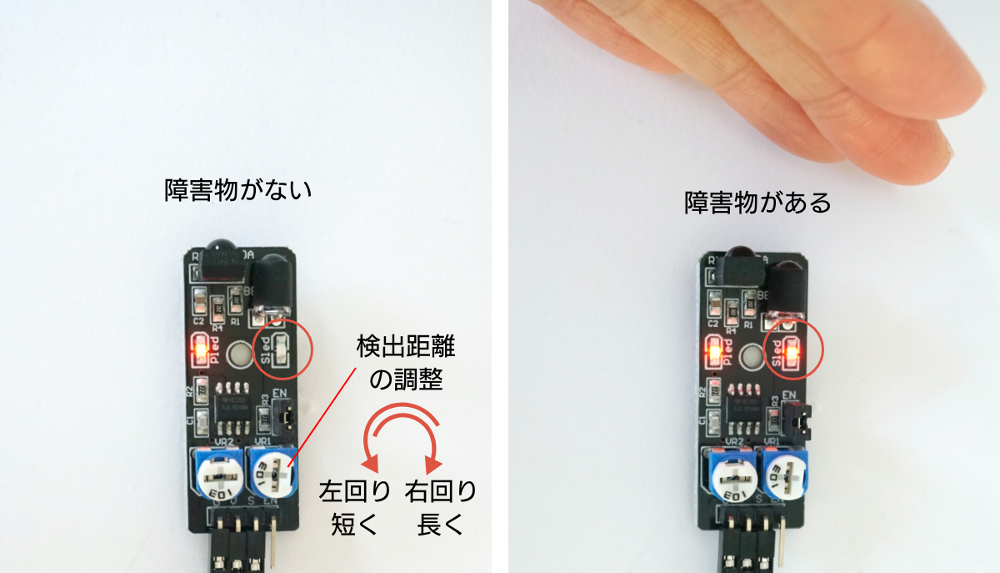
障害物の検出距離は、障害物回避センサについているポテンショメータという調整用の軸をドライバなどで回して調節します。障害物回避センサをSPACEBLOCKにつないで電源が入っていれば、ライトの点灯状況で障害物を検出しているかどうかを確認することができます。
手をかざしたらゴミ箱のフタが開く装置のプログラム
それでは、ゴミを捨てようとしたらゴミ箱のフタが自動的に開く装置を作りましょう。障害物回避センサがゴミを捨てようとする手を検知したら、サーボモーターがゴミ箱のフタを開けるという仕組みです。
まずはプログラムを作ります。次の図の通りです。
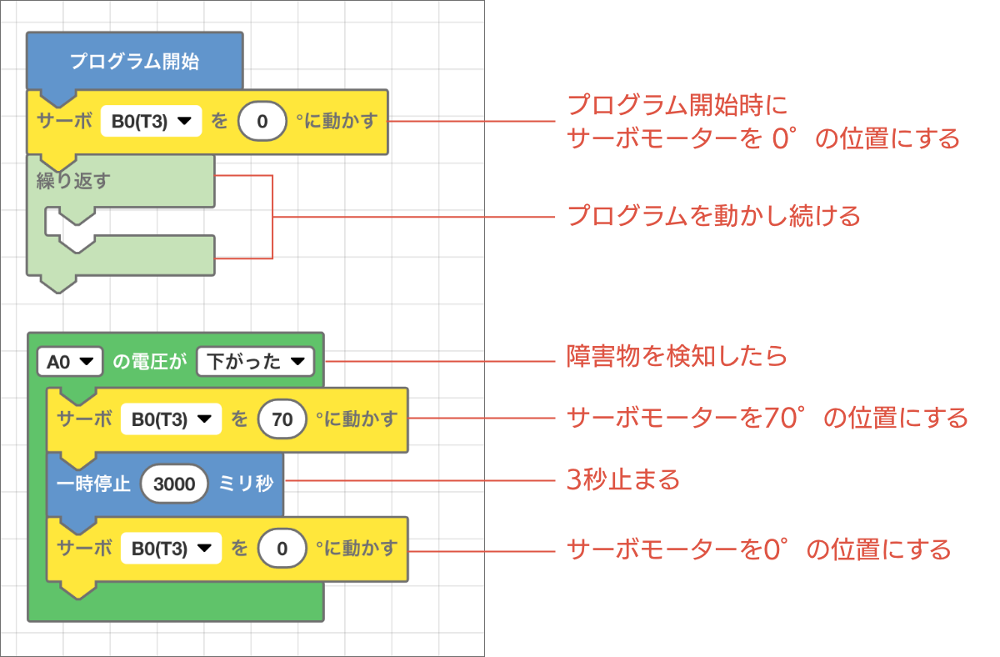
作成したプログラムを実行してみると、障害物回避センサに手を近づけると、サーボモーターがウィンと動き、3秒後に元の位置にまたウィンと動きます。
動画でご覧ください。
サーボの力でフタを開ける仕組み
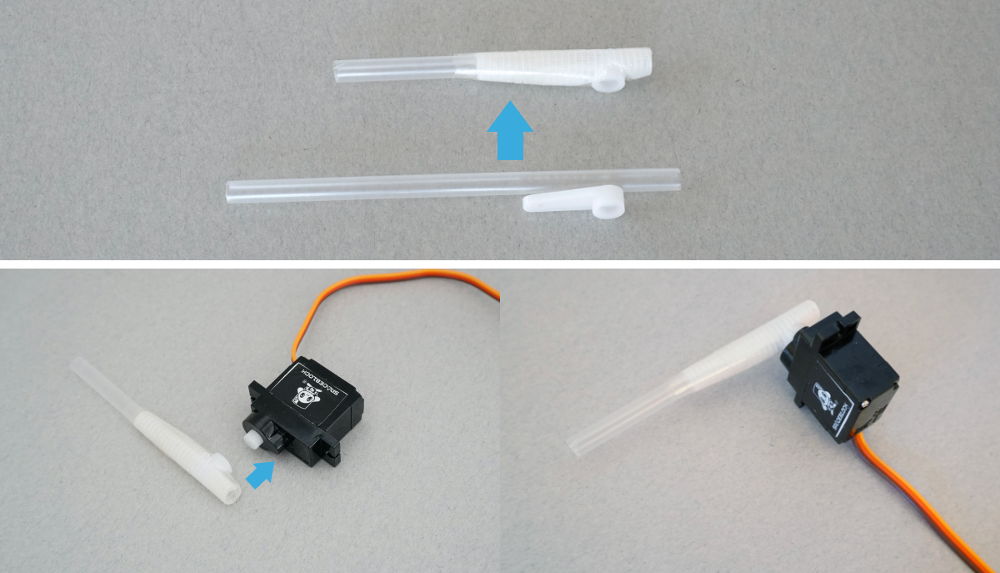
このパーツをゴミ箱の内側につけて、フタを押し上げる動力にする作戦です。

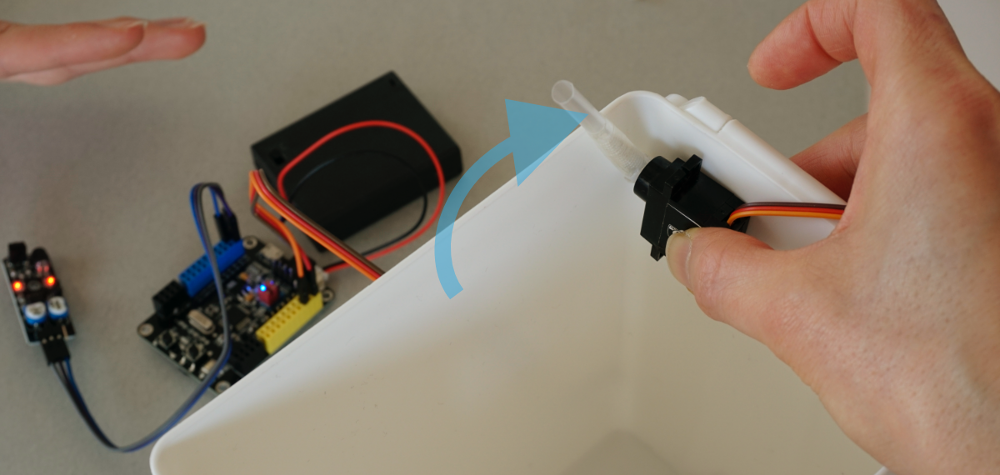
力のかかる場所なので、補強して……
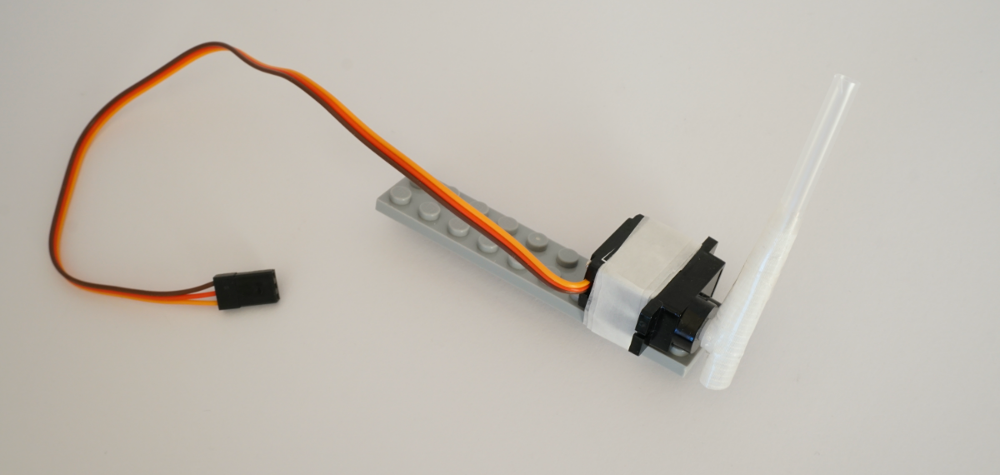
このように取り付けました。

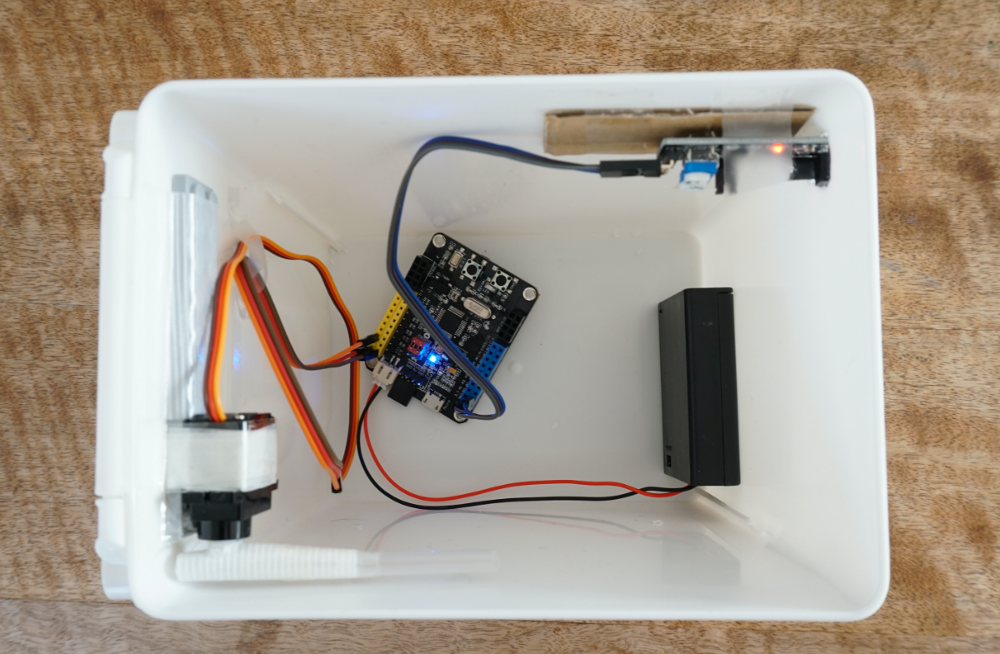
障害物回避センサを設置
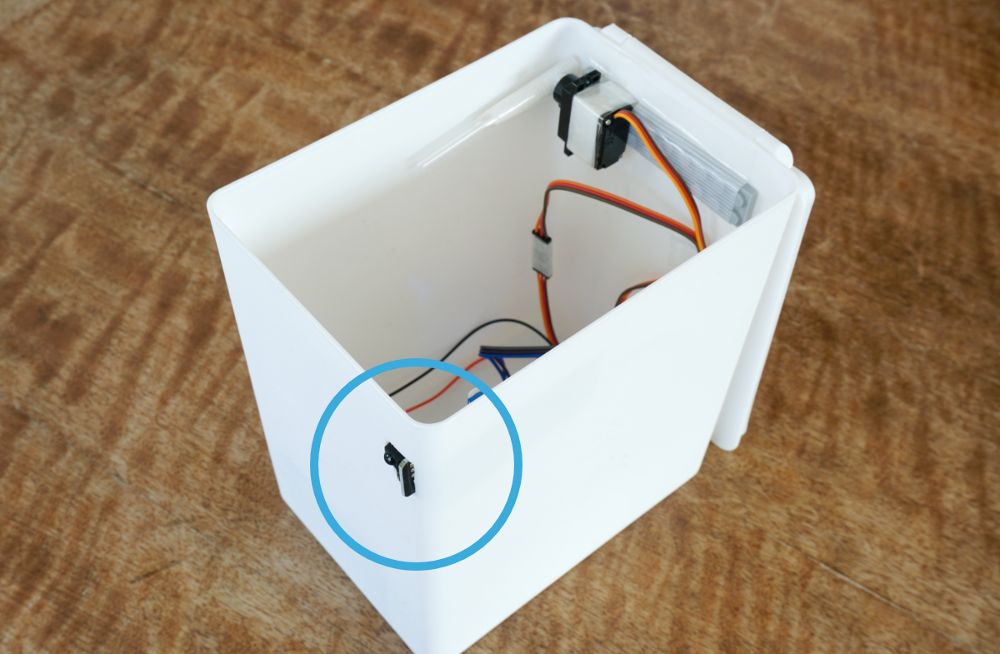

上から見るとこんな感じです。
テスト&完成!!
動画で見てみましょう。

ゴミを捨てているところを動画を見てみましょう。
すいすいと開いてくれるので、なんとなく楽しくてどんどんゴミを捨てたくなってしまいます! サーボを使ったフタの開け方は他にもありそう。みなさんも挑戦してみてください。
身近な「困った……」、「ちょっと面倒……」をSPACEBLOCKの発明でどんどん解決していきましょう!!
